What was the central goal?
Conceptual Framework
This project investigates the potential of Bennett linkages as a deployable structural system, with a focus on applications in post-disaster scenarios. The design is rooted in the integration of spatial mechanical systems and material studies, particularly emphasizing the translation of planar hinge mechanics into a three-dimensional, responsive structure.
The initial concept drew inspiration from emergency architecture and deployable shelter systems, using Bennett linkages for their capacity to transform between compact and expanded states. The system explores the hybridization of planar and spatial mechanics—specifically, how a two-dimensional hinge system can operate in conjunction with a three-dimensional kinetic structure. In collaboration with the Eastman Machine Company, the project also incorporated fabric-based components to extend the expressive and functional range of the structure, culminating in a tensile envelope that responds dynamically to the structure’s movement.
Structural System
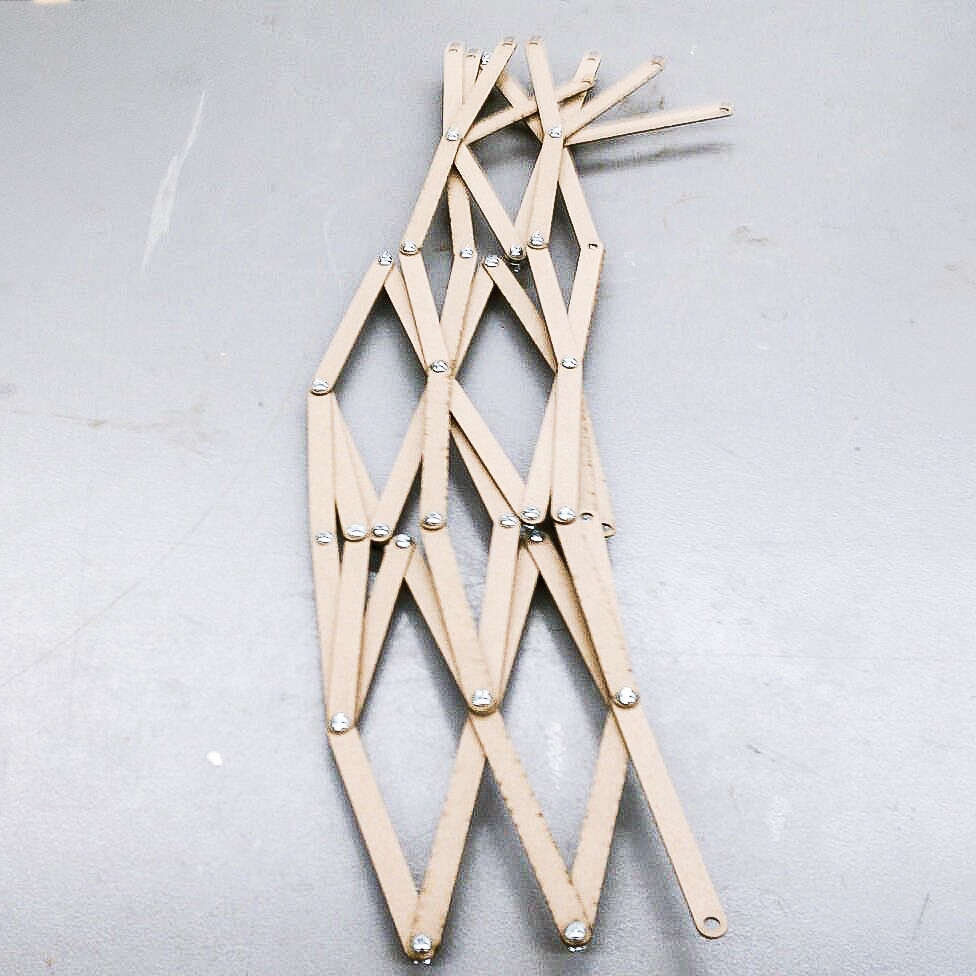
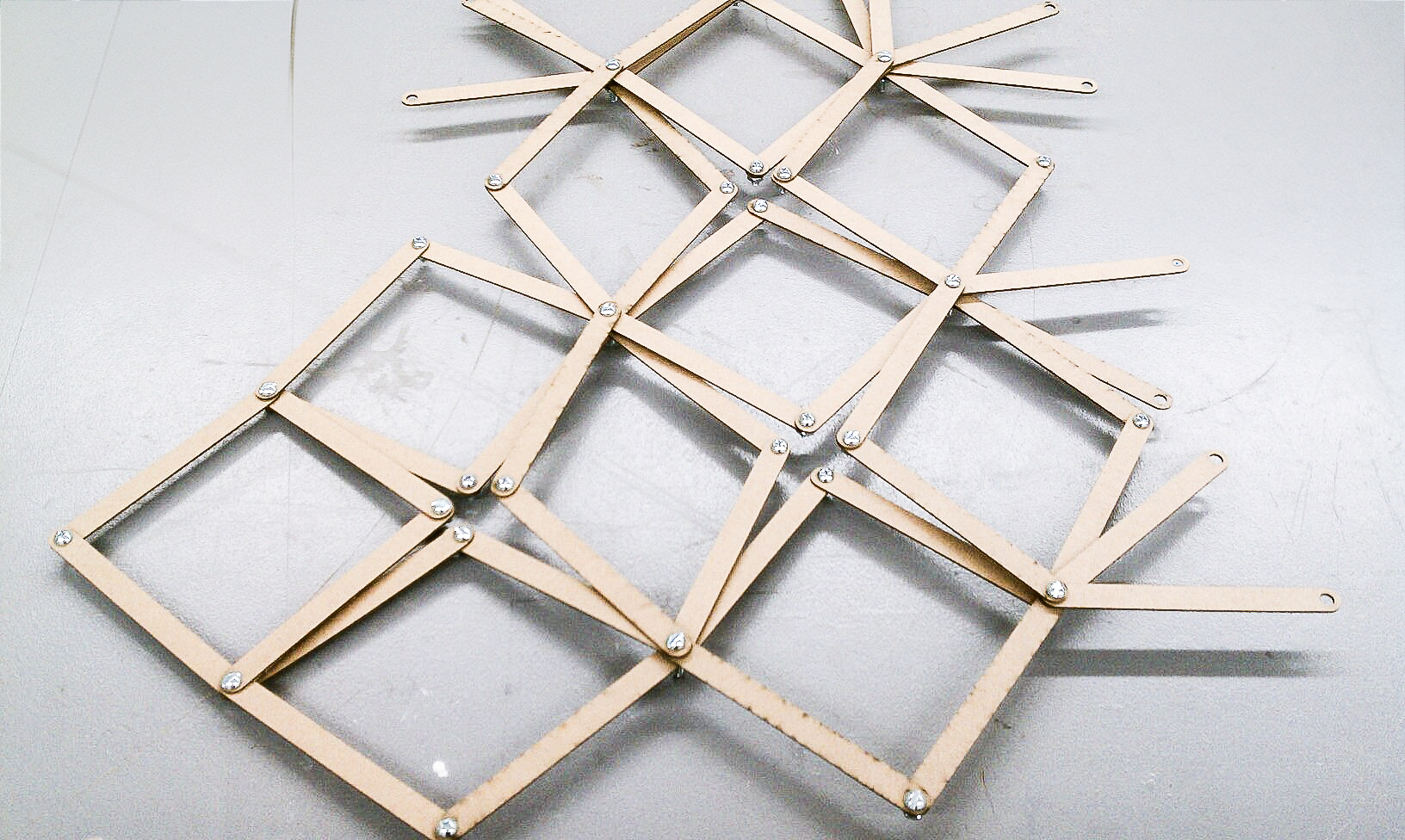
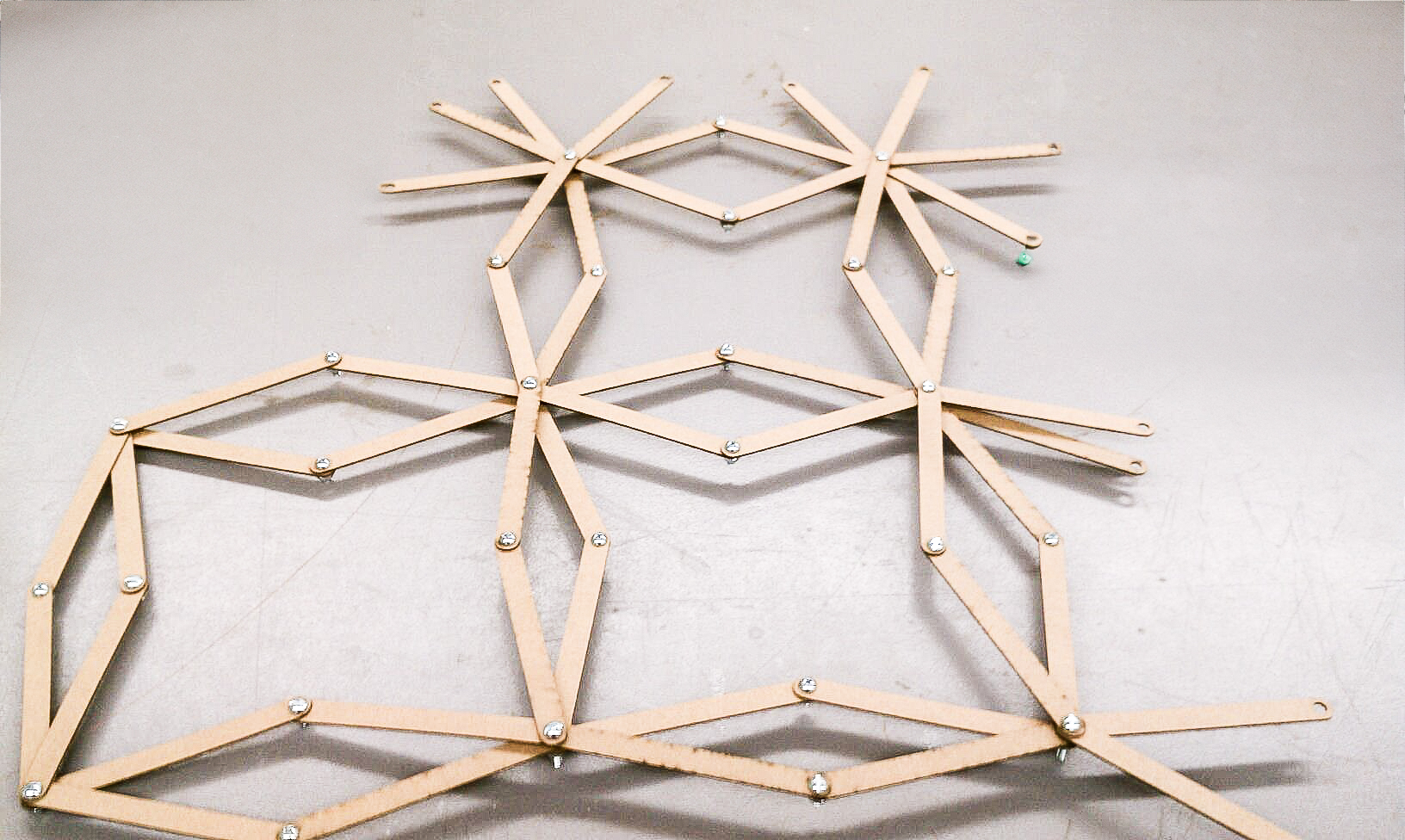
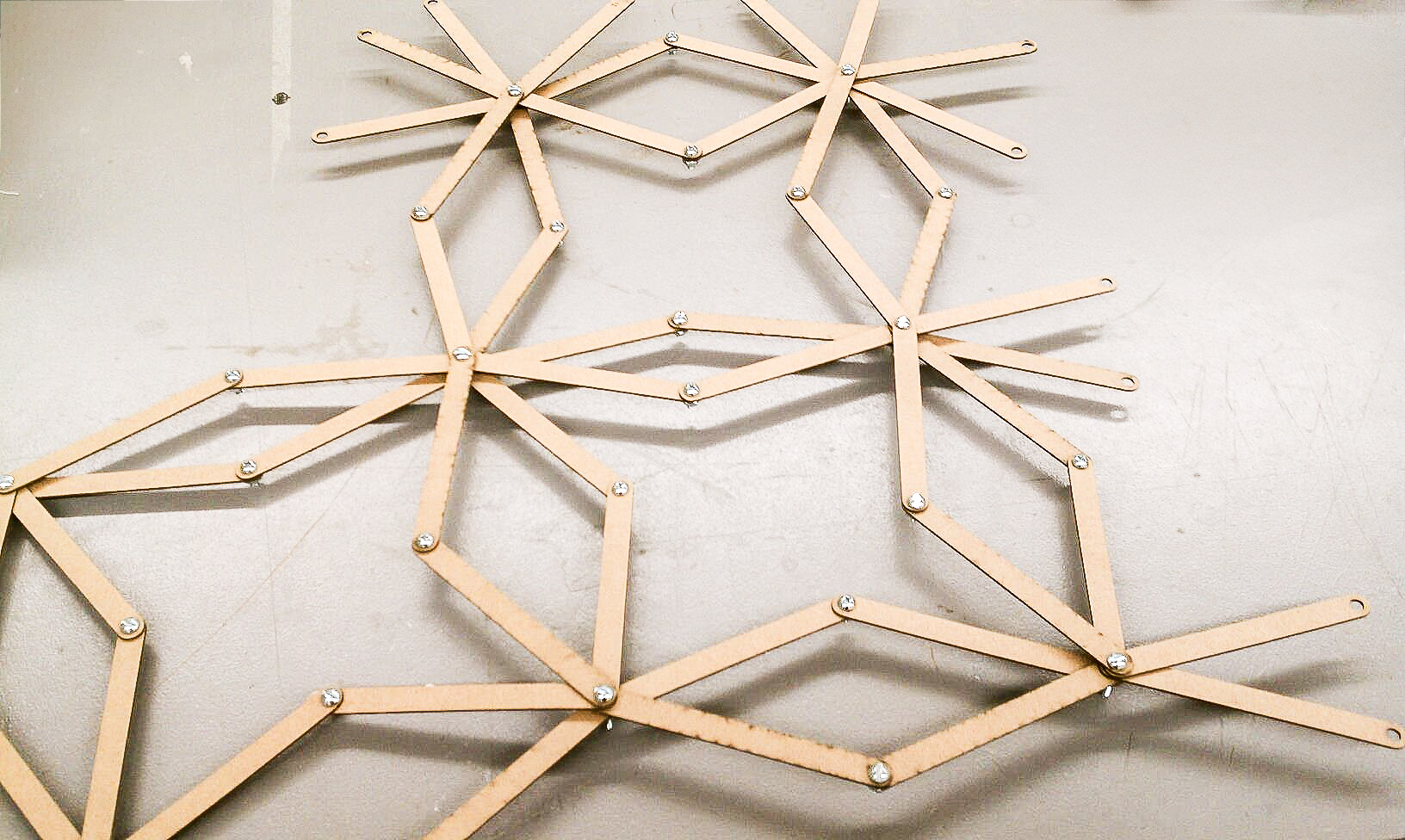
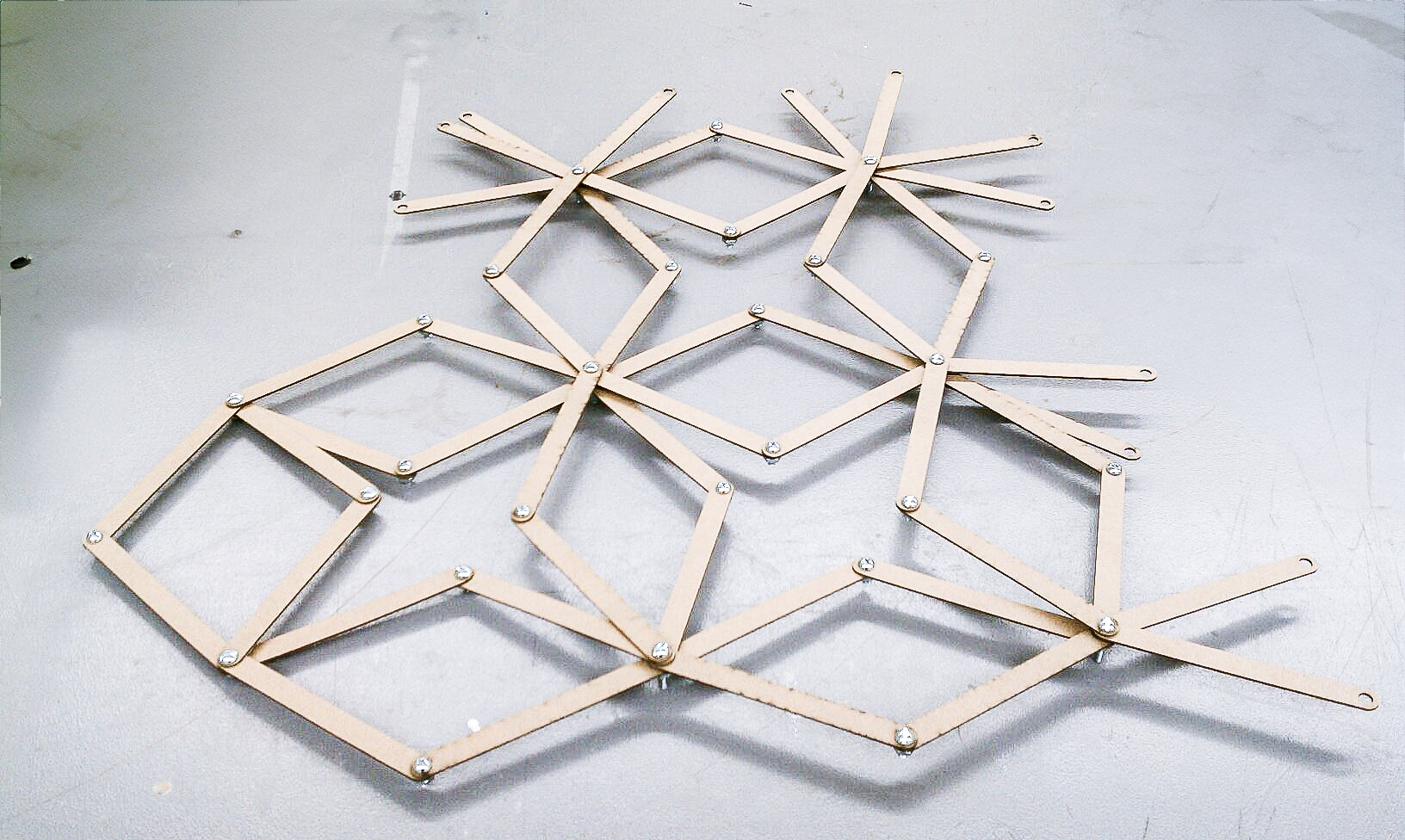
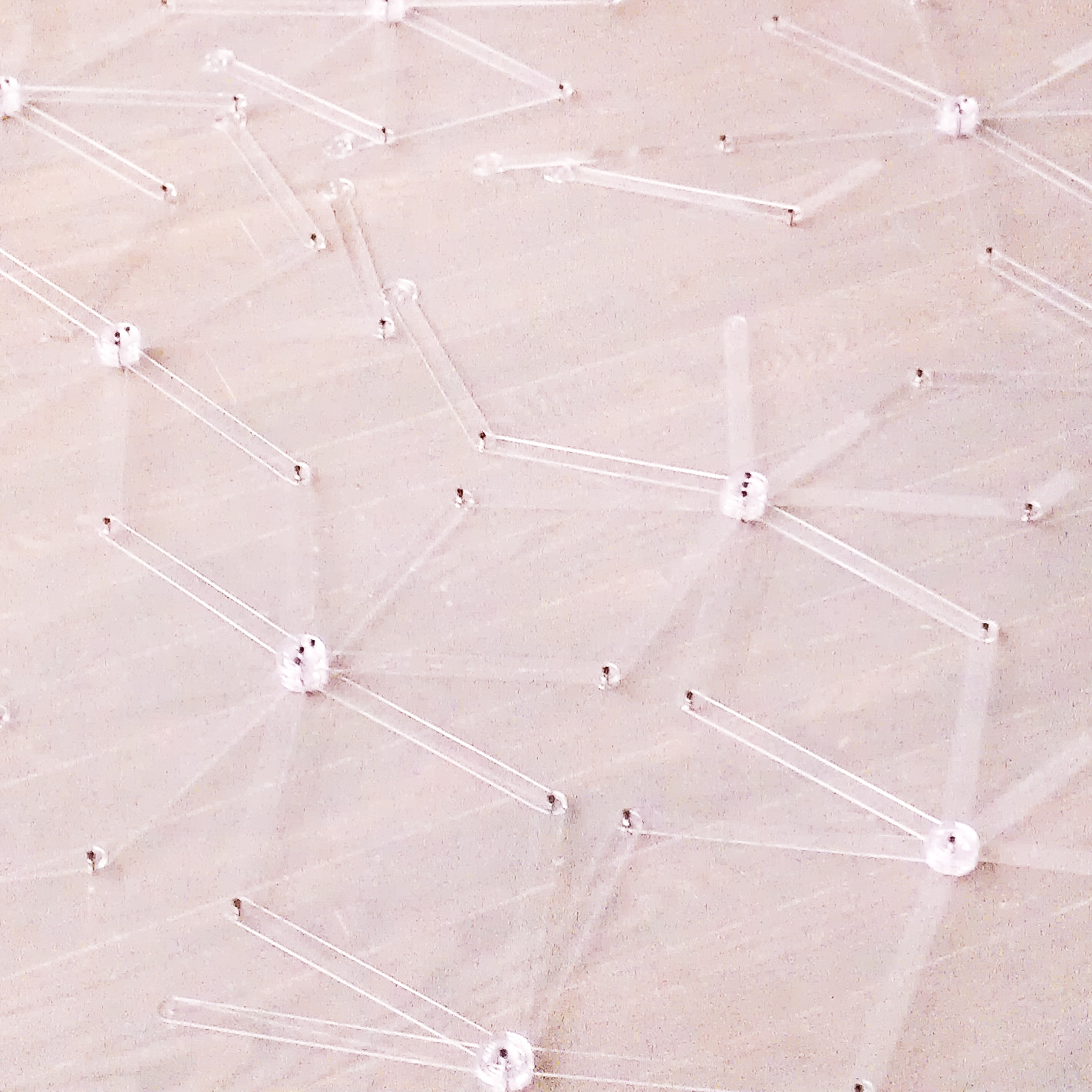
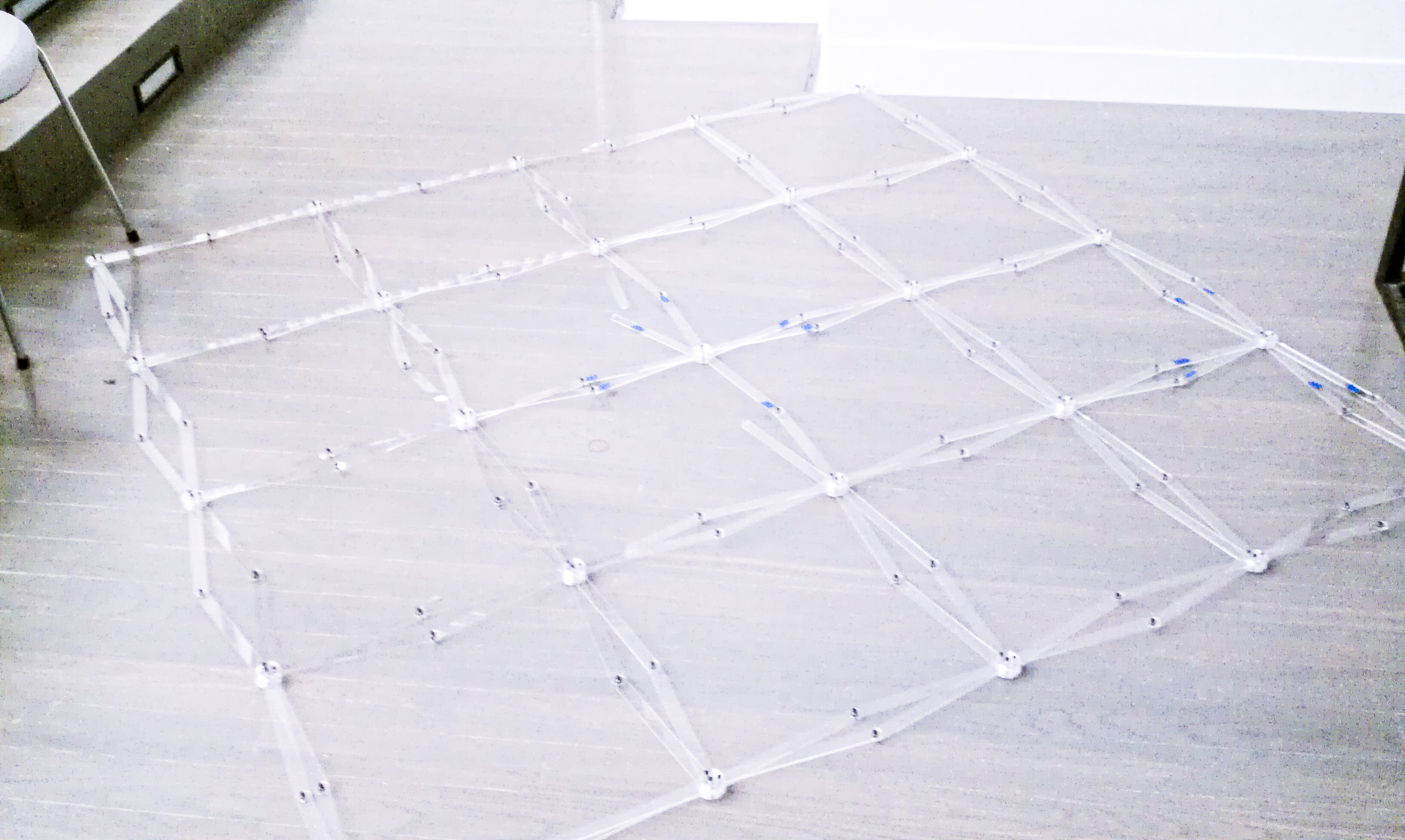
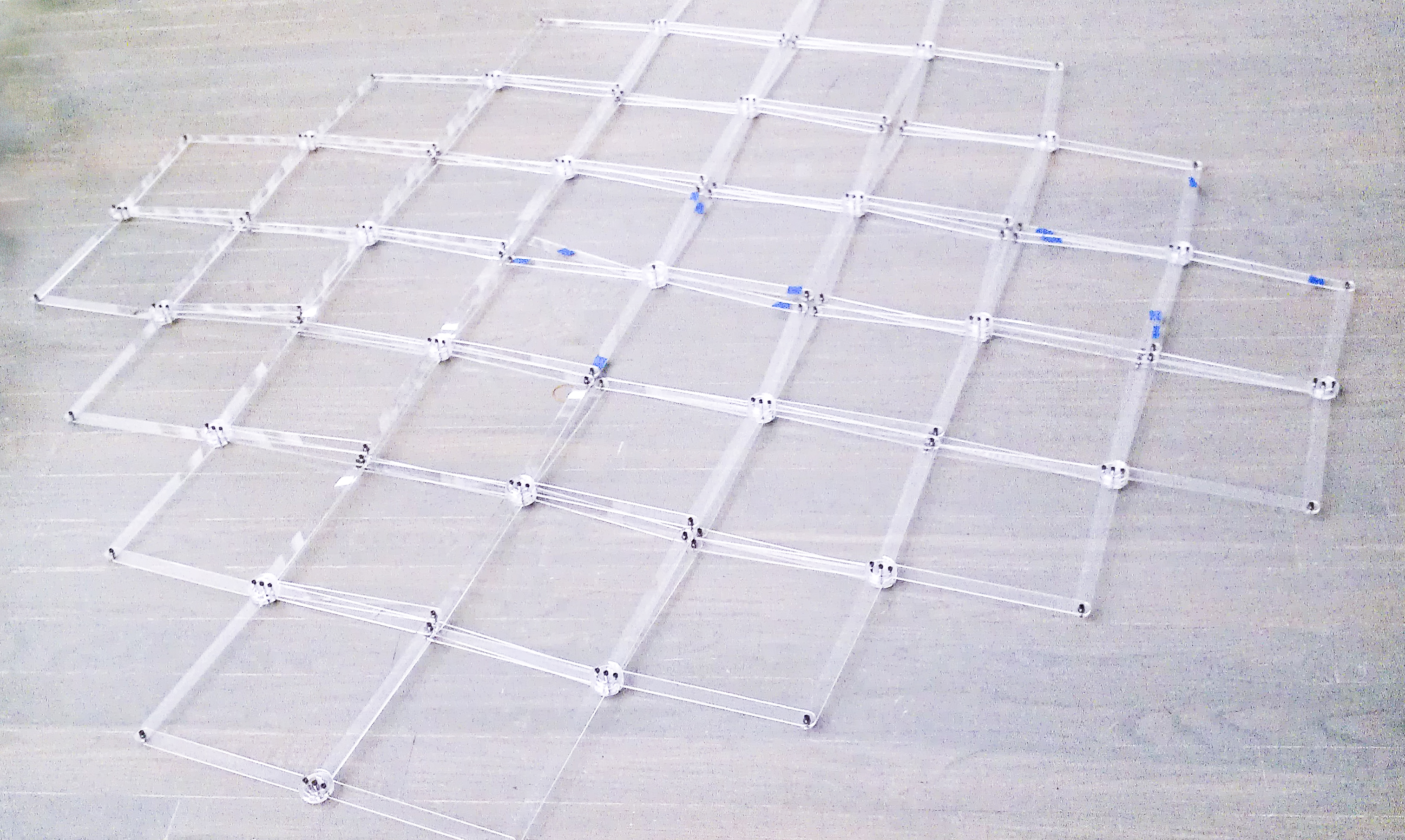
The structure is based on a series of interconnected four-bar linkages, each capable of planar rotation across 180 degrees. When connected, these linkages collectively form a multi-degree-of-freedom system in which the motion of one component influences the behavior of others. The system progresses from a single four-bar loop to more complex configurations, including eight-bar linkages that reduce the degrees of freedom in order to enable a unified, controlled deployment.
This coordinated behavior results in rapid expansion and contraction of the overall assembly. The mechanical hierarchy—ranging from isolated rotations to global transformation—is designed to simulate dynamic behaviors such as seismic wave propagation. In this context, the project draws a metaphorical connection between the structural network and the distributed forces observed during earthquakes.
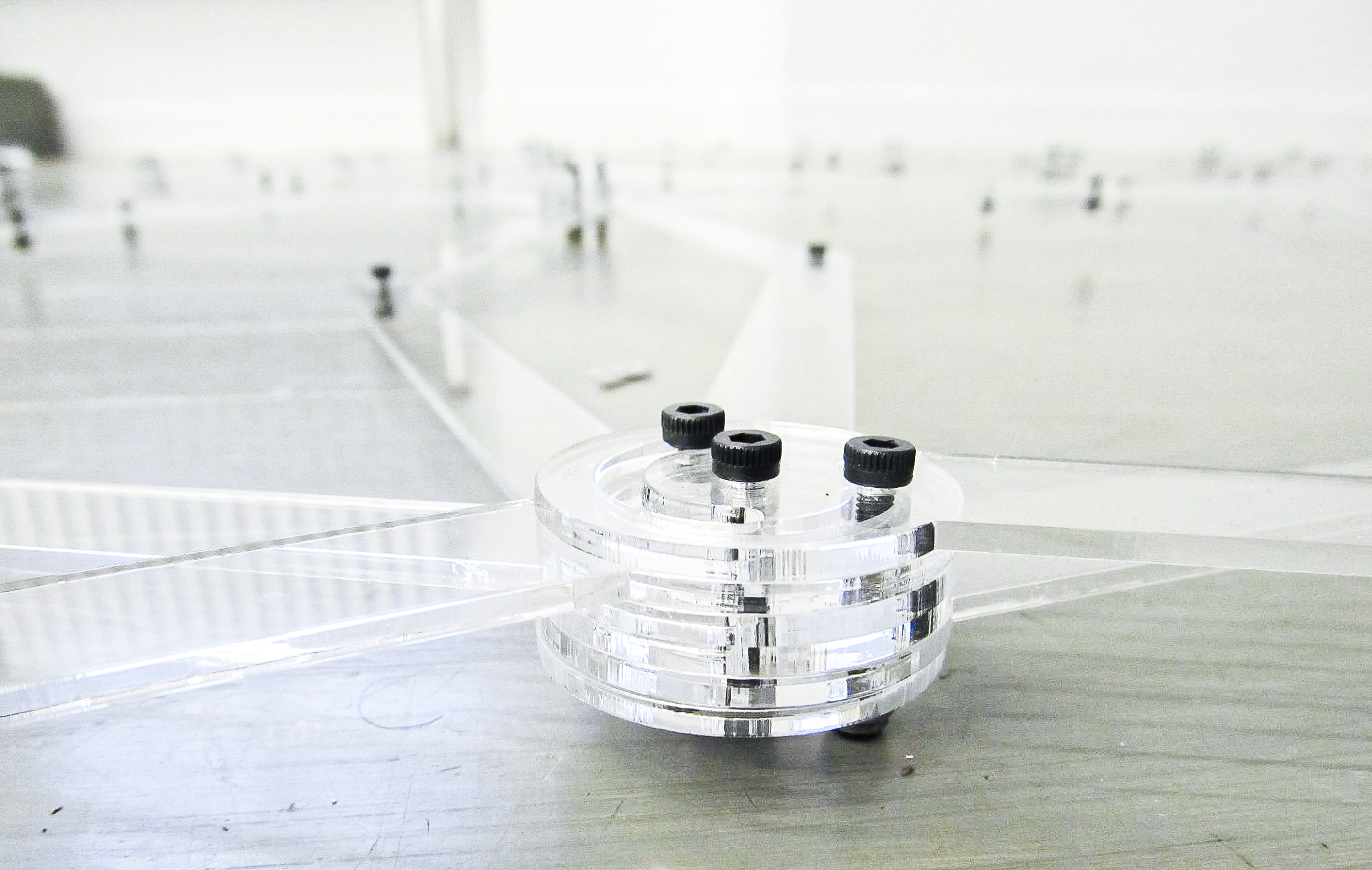
Joint and Hinge Design
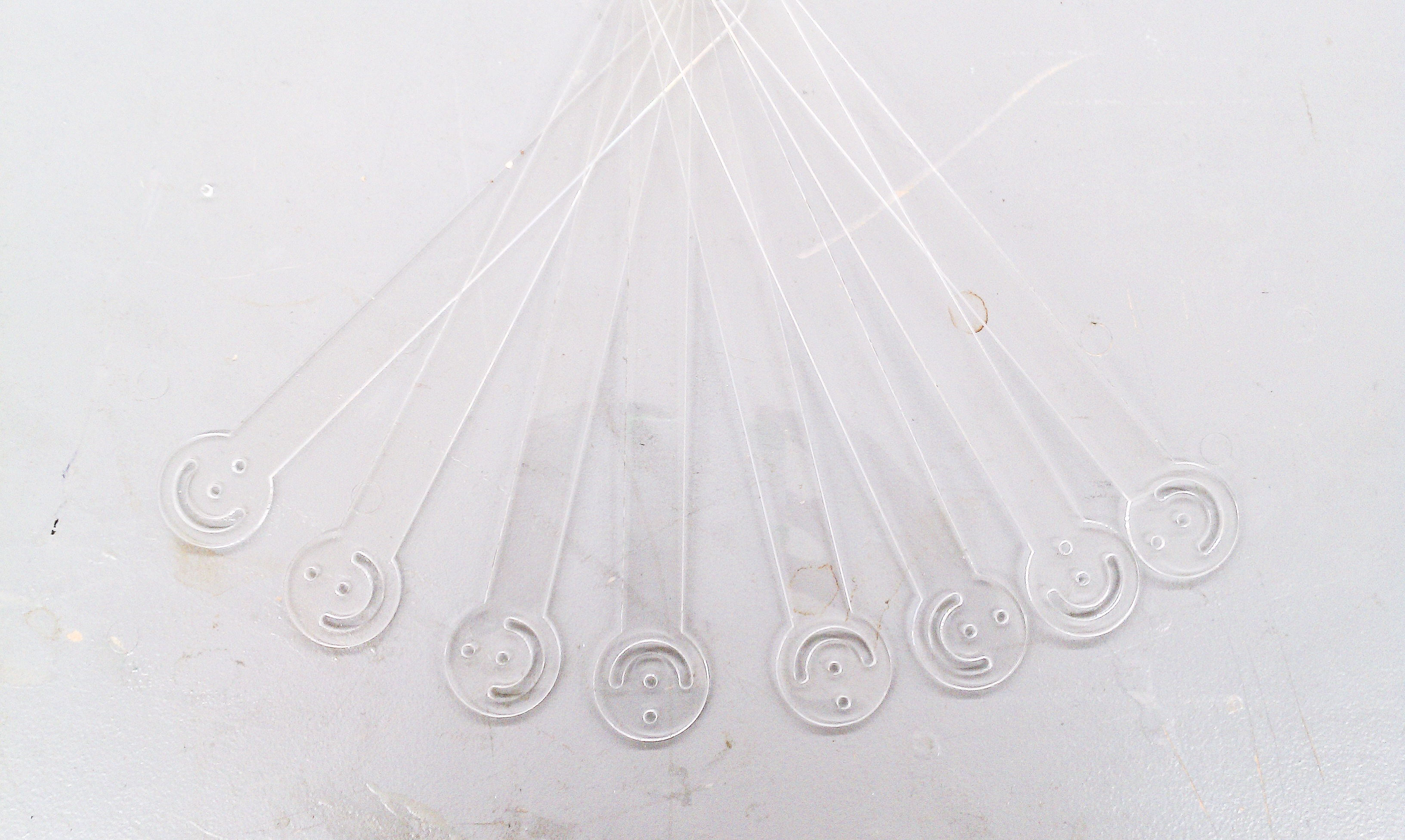
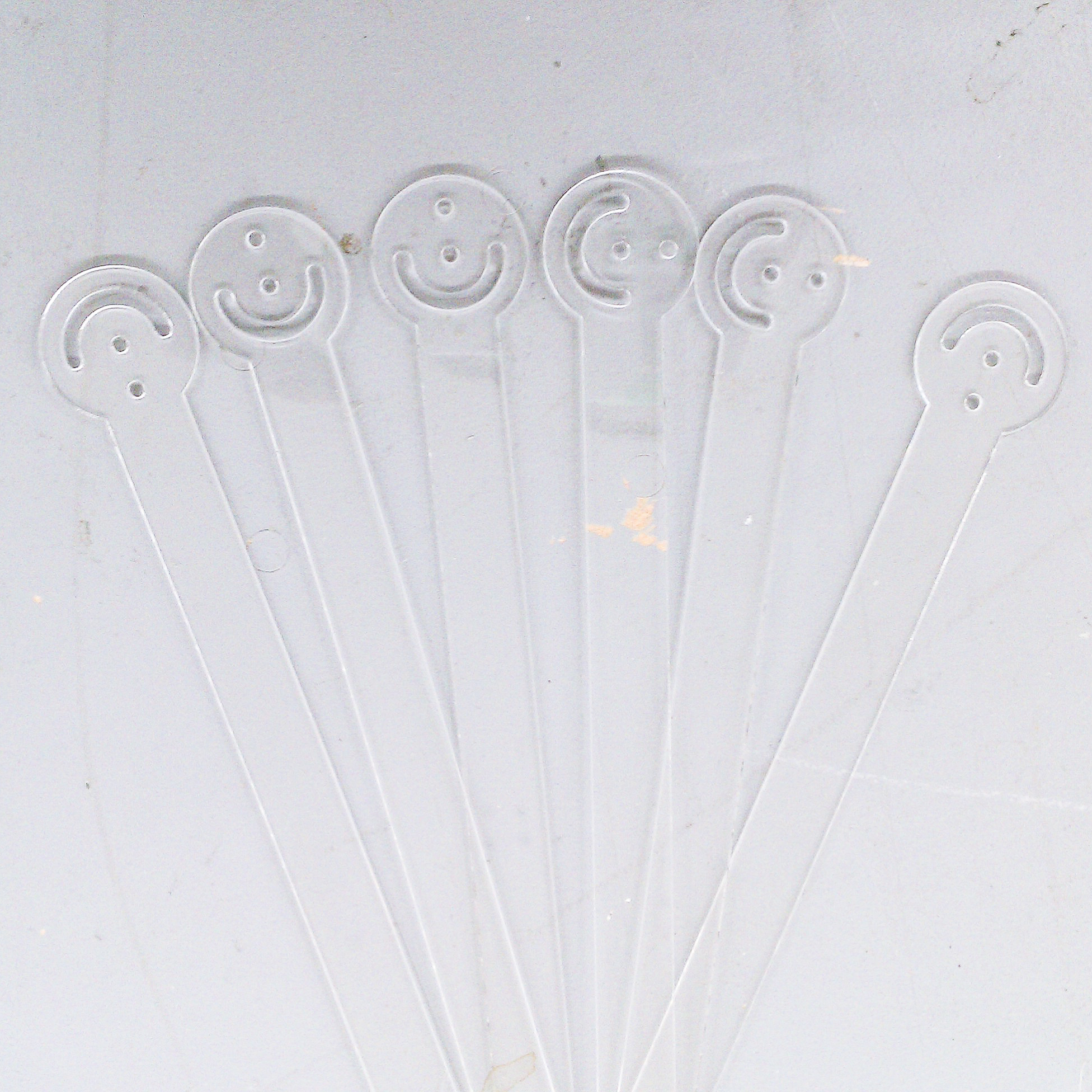
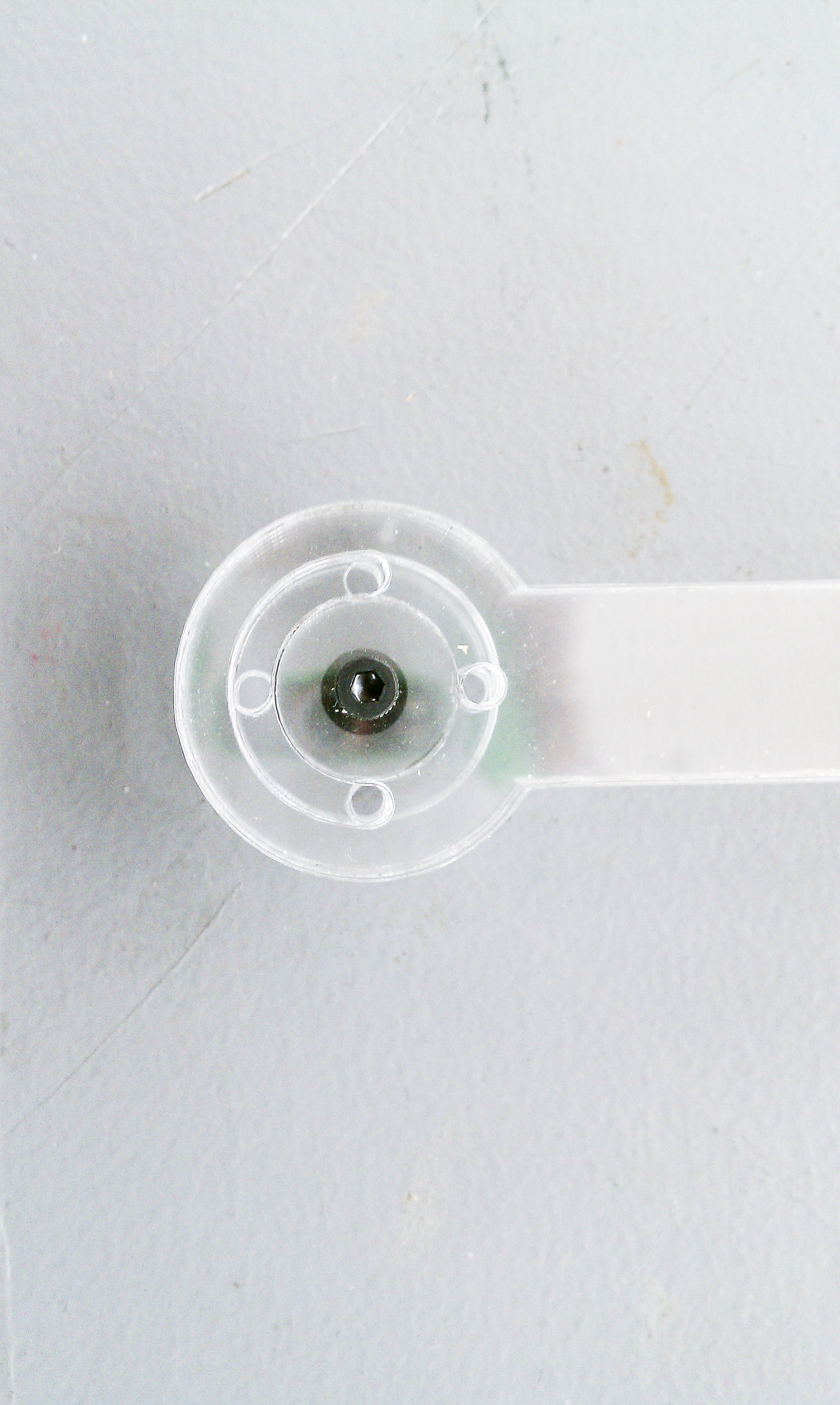
At the core of the system are precision-fabricated joints made from lightweight materials, including acrylic and nylon. These materials were selected for their optical transparency and low weight, allowing the mechanical motion to remain visually unobtrusive while maintaining structural clarity. The joints allow for rotational motion defined by specific mathematical parameters, with four primary hinge configurations repeated across eight bars to create a modular and scalable framework.
Fabric Integration
A stretchable mesh fabric is employed to envelop the linkage system, introducing a responsive skin that changes visual properties based on the structure’s state. When collapsed, the mesh appears nearly opaque; as the structure expands, varying levels of translucency reveal the internal mechanical elements. This interplay between concealment and exposure enhances the structural narrative and introduces a spatial ambiguity aligned with themes of emergence and recovery in post-disaster contexts.
Originally conceived as a manually actuated system, the project evolved to incorporate real-time seismic data as the trigger for deployment. This shift positioned the structure not only as a spatial mechanism but as a data-driven installation with conceptual ties to environmental forces.
Seismicity and Actuation Logic
The deployment sequence is actuated by a stepper motor system governed by earthquake magnitude data. Three discrete rotations—90°, 180°, and 270°—correspond to seismic events of increasing intensity:
- 90° Rotation: Activated by earthquakes measuring M1.0–M3.9
- 180° Rotation: Activated by events measuring M4.0–M6.9
- 270° Rotation: Activated by high-magnitude earthquakes measuring M7.0–M10.0
Real-time data streams control only the initial (90°) actuation, while a calibrated dataset drawn from historical seismic events—such as the 2011 Tōhoku earthquake in Japan (M9.0)—can activate the full expansion cycle. Local seismic data informs lower-magnitude responses, while international data triggers higher-order motions, establishing a global-local relationship between environmental inputs and structural behavior.













And the tl;dr
This project was a success in many ways, but many challenges hindered its full expression. However, it still remains one of my favorite projects from my time in graduate school.
Insallation Woes
Even though each individual part worked, the installation went sour at the last minute. The ceiling of the space was extremely high, necessitating a scissor ladder to access it. This was granted the day before the final presentation, which didn't leave enough time to test.
Material Choice
The acrylic was not rigid enough and deflected heavily under gravity. If I were to attempt the project again, I might use rigid posterboard or aluminum. The acrylic made for a striking visual, though.
From Research to Practice
Despite the installation challenges, I learned an incredible amount from this work. I was able to turn disparate research papers on various linkage system into a working prototype in Grasshopper then in material in just a few weeks.
This project was originally completed in 2013 as part of my MArch work at SUNY Buffalo. A decade later, I returned to it with a Grasshopper specialist, Laiba Uzair, to fully realize the computational model I'd conceived but didn't have the bandwidth to execute at the time. What you're seeing now is the project as it was always meant to exist.